 Página anterior Página anterior | Voltar ao início do trabalho | Página seguinte  |
Pretende-se, aqui, apelar às memórias pessoais do consumidor e suas emoções subjectivas para o atrair (Norman, 2004).
A face e as suas expressões físicas representam o espelho do nosso estado emocional, o mesmo deverá acontecer com os companheiros virtuais, de maneira a que o utilizador consiga percepcionar as suas intenções e estado emocional. As emoções revelam-se como um mecanismo de controlo e de aprendizagem, sendo que o robot ou companheiro virtual reage aos estímulos expostos pelo utilizador agindo, assim, de acordo com as suas necessidades (Malfaz & Salichs, 2004).
Emoção e cognição desempenham diferentes, mas igualmente importantes, papéis no processo de estabelecimento de uma relação do indivíduo com o meio. A cognição interpreta e constrói o sentido do mundo, a emoção avalia e julga, estando também desperta a possíveis perigos. A importância destes conceitos prende-se com a compreensão profunda de que se o objectivo é dotar o robot ou companheiro virtual com características humanas, estes conceitos são uma componente fulcral para o processo de design de máquinas afectivas. A componente emocional surge como elemento essencial para existir uma identificação com o outro, sendo que as emoções são aquilo que nos torna únicos e identificáveis. A identificação com o companheiro virtual é atingida através da relação comportamental, bem como pela partilha de experiências e objectivos.
Picard (Picard, 1999) apresenta quatro motivos principais para a importância da presença de emoção em robots. O primeiro prende-se com o desenvolvimento de robots com a capacidade de facilitar a comunicação ao nível emocional do utilizador. O segundo relaciona-se com a vontade de desenvolver robots inteligentes, que consigam desenvolver capacidades sociais e emocionais, já o terceiro motivo prende-se com o desenvolvimento de infraestruturas e aplicações que consigam controlar a informação afectiva. Por fim, o quarto e principal motivo expõe a necessidade de tornar a interacção com robots menos frustrante, facilitando, assim, a interacção humano-máquina. A emoção revela-se aqui como uma forma de dotar o robot com reacções mais rápidas, capacidade de contribuir para a tomada de decisão e dar destaque a acções importantes ao utilizador.
Para a disseminação da relevância da emoção nos processos cognitivos muito contribuíram os estudos de Damásio (1996, 2000, 2003), que comprovaram que as emoções influenciam de facto alguns dos processos cognitivos mais importantes, para a sobrevivência do ser humano no seu meio. Esta comprovação ocorreu por via de estudos realizados com vários dos seus pacientes, que sofriam de lesões em áreas da região préfrontal do cérebro, ou na região que alterava sistematicamente a capacidade de tomar decisões para benefício próprio em situações de risco ou conflito. Estes resultados comprovam a importância da emoção como auxílio à racionalidade. É com recurso à emoção que a razão vai funcionar da forma mais correcta (Damásio, 2000: 62). Parece, desta forma, certa a relação intrínseca entre tomada de decisão e emoção. Todos os indivíduos em estudo, que sentiram a perda da capacidade de tomada de decisão, ficaram igualmente desprovidos de experienciar e fruir as emoçõe.
A computação afectiva visa atribuir à máquina capacidades para desenvolver inteligência emocional. Os estudos já abordados de Damásio (Damásio, 1996) contribuíram para o desenvolvimento desta área científica, uma vez que demonstraram que a emoção influencia a percepção, a racionalização de tomada de decisão, a aprendizagem, bem como outras funções cognitivas. Tal como o conhecimento empírico nos diz que demasiada emoção pode confundir o nosso pensamento e razão, também a falta de emoção pode desempenhar o mesmo papel (Picard, 2000).
Existem quatro tópicos fundamentais a focar: o reconhecimento de emoção, a expressão de emoção, experienciar emoção e ter inteligência emocional. A capacidade de reconhecer emoção é vital num companheiro virtual, o que desejamos é que o companheiro virtual tenha a capacidade de detectar o estado emocional da criança ou aprendiz, de forma a agir em conformidade. Apenas desta forma é possível que o companheiro virtual, ao detectar sinais de cansaço ou aborrecimento, altere o seu comportamento e volte assim a captar a atenção do utilizador e a aumentar o seu nível de motivação, para continuar a interagir com o companheiro e finalizar as suas tarefas.
No que diz respeito à expressão de emoção por parte do companheiro virtual, esta é uma componente relevante para o utilizador sentir empatia pelo companheiro e, simultaneamente, sentir que o companheiro percepciona o seu estado correctamente e em função dele fornecer uma resposta adequada. O companheiro virtual deverá conseguir influenciar o estado emocional do utilizador, ao demonstrar uma personalidade alegre e positiva, evidenciando uma grande motivação pela tarefa que está a realizar, podendo assim levar a que o utilizador eleve igualmente o seu grau de envolvimento com as tarefas, bem como a sua satisfação ao realizá-las (Picard, 2000: 58).
A experiência de emoção pelo companheiro virtual não necessita da presença da emoção em questão no sistema. Porém a introdução de emoção num robot pode começar pela inclusão de sistemas rudimentares perceptuais e capacidade de tomar decisões. A geração de emoção é possível através da definição de uma série de regras, atingindo assim uma forma de pensamento racional, esta metodologia é baseada no modelo OCC, Ortony Clore Collins, (Ortony, Clore, & Collins, 1990), modelo que não foi concebido com o objectivo de gerar emoção, no entanto é o modelo utilizado mais frequentemente.
Relativamente à inteligência emocional, é esta característica que permite que o companheiro virtual consiga estabelecer empatia com o utilizador. É essencial que o agente virtual consiga reconhecer as emoções do utilizador e responder de acordo, é esta a base da inteligência emocional, o estabelecimento de empatia, a compreensão do outro e a consciência social.
No âmbito da presente investigação é pertinente traçar a evolução de robots e agentes virtuais, na medida em que o estudo a realizar vai permitir vislumbrar quais as características mais relevantes na concepção de entidades tutoras.
Apesar de existirem diferentes denominações para os agentes virtuais e robots como companheiros, todas as tipologias têm pontos em comum (de Vos, 2002): aparência humana ou antropomórfica: existe na generalidade dos casos uma corporalização do agente virtual na forma humana, animal ou ficcional; o corpo do agente é utilizado como meio de comunicação, o que significa que a corporalização do agente tem como objectivo transmitir uma mensagem ao utilizador seja através da expressão facial, gestos, postura corporal ou animações, que indicam que o sistema está em actividade; utilização de protocolo de comunicação natural: a natureza da Interacção Homem Computador é bastante diferente da Interacção Homem Robot e por essa razão é vital que a interacção com um agente virtual seja intuitiva e inspirada na comunicação face a face, em vez da comunicação através de botões e menus; comunicação multimodal, assim como a comunicação face a face, a comunicação com agentes virtuais deve basear-se igualmente em canais distintos como a verbalização, gestos, comportamento, entre outras formas; existência de um papel social, na medida em que ao contrário de um programa de computador, o agente virtual tem como objectivo cumprir uma determinada função, seja esta relacionada com o auxílio de aprendizagem, com a conclusão de tarefas ou assistência ao utilizador.
Entre os agentes virtuais mais marcantes deste processo de desenvolvimento encontramos o Rea (Figura 1), surgido em 1994, foi o primeiro agente virtual antropomórfico com produção de gestos, fala e expressões faciais (de Vos, 2002). Foi desenvolvido por uma das investigadoras pioneiras na área dos agentes antropomórficos, Cassel[2]quando integrava o Gesture and Narrative Language Group do MIT Media Lab.

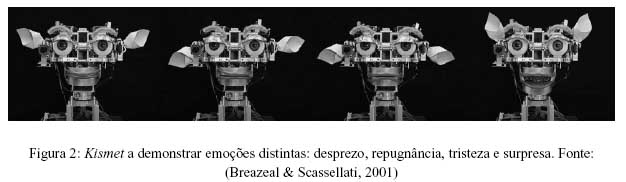
Entre os robots mais mediáticos encontra-se o Kismet (Figura 2), desenvolvido por Breazeal[3]no âmbito do Sociable Machines Project (Breazeal, 2000), sendo que o objectivo primordial era criar um robot socialmente inteligente, que conseguisse comunicar e aprender com as pessoas, estabelecendo uma relação que se assemelhe à de uma criança e do seu cuidador. Tendo em vista este objectivo, foi implementado um sistema emocional no robot permitindo que este conseguisse desenvolver intenções, crenças, desejos e sentimentos.
A mais recente exibição do MIT Media Lab apresentou-nos o Nexi (Figura 3), um robot sociável concebido para assumir o papel de companheiro ou de integrar equipas de trabalho.
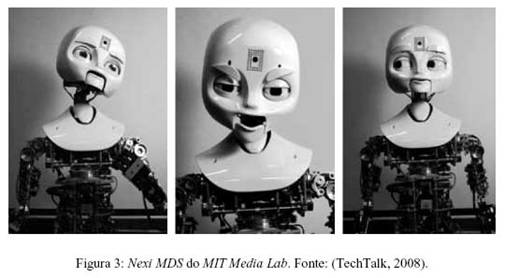
À semelhança de Kismet foi desenvolvido pela equipa de Breazeal, Nexi é denominado de robot MDS (Mobile, Dextrous, Social), e difere de Kismet no facto de possuir um corpo completo, cabeça, tronco, membros superiores e inferiores.
Desenvolvido para ser bastante expressivo, o Nexi MDS está equipado com câmaras de vídeo no lugar dos olhos, microfones dentro dos ouvidos e uma câmara de infravermelhos para melhor detectar objectos, pessoas e vozes (TechTalk, 2008).
A interacção com computadores é aceite como uma forma de desenvolver funções cognitivas como a resolução de problemas, compreensão e aprendizagem. A interacção com agentes virtuais é motivante e envolvente, e sendo que também a motivação é vital no processo de aprendizagem é um objectivo tornar os agentes pedagógicos virtuais, ou entidades tutoras, divertidos conseguindo assim elevar os índices de motivação dos aprendizes (de Vos, 2002; Johnson, Rickel, & Lester, 2000; Norman, 2004).
O agente pedagógico virtual tem uma área de acção que não se circunscreve à comunicação verbal, é sobretudo a comunicação não-verbal que lhe confere maior realismo e confiança perante os seus utilizadores. O agente tem a capacidade de demonstrar como se efectua uma determinada tarefa, utiliza gestos para chamar a atenção do aprendiz, utiliza as expressões faciais como forma de dar feedback das acções do aprendiz e recorre a outras acções não-verbais (Johnson, Rickel, & Lester, 2000).
Entre os agentes pedagógicos virtuais desenvolvidos nos últimos anos destaca-se o Steve (Soar Training Expert for Virtual Environments), desenvolvido pelo USC Information Sciences Intitute"s Center for Advanced Research in Technology for Education (CARTE) com o objectivo de interagir com estudantes em meios virtuais imersivos ligados em rede, tendo ainda sido aplicado ao treino de funções navais (Figura 4) (Johnson, Rickel, & Lester, 2000; Breazeal, Emotion and sociable humanoid robots, 2003).

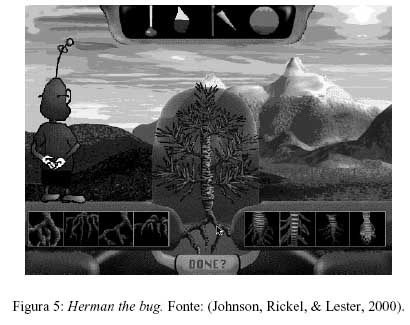
Ainda outro exemplo de uma entidade tutora notabilizada é o Herman the Bug (ver Figura 5), desenvolvido através da North Carolina State University"s IntelliMedia Initiative é um agente que vive num meio apelidado de Design-A-Plant, um meio de aprendizagem do âmbito da anatomia e fisiologia botânica (Johnson, Rickel, & Lester, 2000; Lester & Stone, 1997).
No que toca ao caso português, a investigação nesta área não é muito extensa, contudo, é possível encontrar alguns investigadores a desenvolver investigação e projectos neste âmbito, como é o caso de Paiva[4]que desenvolveu um agente pedagógico virtual, Vincent (Figura 6), (Paiva, Machado, & Martinho, 1999).

Trata-se de um agente pedagógico virtual concebido para ser inserido num sistema de aprendizagem numa plataforma Web, TEMAI, que dá formação a funcionários portugueses de empresas de calçado.
O poder motivacional conferido pelas entidades tutoras virtuais é inegável, a questão que se coloca é de que forma é alcançado este sucesso. Um ponto-chave é a demonstração da tarefa, por vezes o simples acto de apresentar uma explicação de como se processa determinada tarefa não é suficiente, a demonstração constitui uma forma mais acessível para o aprendiz compreender o que deve fazer, e como deve fazer determinada tarefa.
Por outro lado, a orientação dada ao aprendiz é muito mais pessoal e direccionada às necessidades específicas do aprendiz, também a imersão em ambientes virtuais permite ao aprendiz desenvolver as suas capacidades espaciais.
O desenvolvimento de um companheiro virtual deve incidir com particular importância no interface emocional do mesmo, tendo em conta que aspectos como a expressão de emoção, expressões faciais, personalidade e memória constituem as múltiplas facetas do companheiro, permitindo que este seja credível e alvo de identificação.
A emoção e sua caracterização como factor humanizante, bem como os modelos que podem servir de base para gerar emoção em robots e agentes virtuais. As expressões faciais que surgem como forma de exteriorizar as emoções e, como tal, graças aos modelos de medição de emoção é possível concluir quais as áreas da face a alterar de forma a expressar as emoções pretendidas. A personalidade constitui, de igual forma, uma componente extremamente importante para o estabelecimento de empatia com o utilizador e, como tal, para simular a personalidade desejada para um agente virtual é possível recorrer a estratégias distintas. E por fim, surge a memória como elemento relevante para a entidade virtual, uma vez que é um factor determinante para a aprendizagem e armazenagem de informação.
As emoções são um factor comum ao ser humano e aos animais, todavia as emoções nos humanos possuem um carácter especial, na medida em que estas se interligam com as nossas acções, valores e juízos intrínsecos à vida humana. Sem emoções não seríamos capazes de tirar prazer da vida e de apreciar o que nos rodeia, são as emoções que conferem importância e significado às coisas (Gross, 1999; Ekman, Basic Emotions, 1999).
A emoção divide-se em seis emoções primárias ou universais: felicidade, tristeza, surpresa, medo, repulsa e cólera (Gleitman, 1993; Herbon et al., 2005), emoções secundárias ou sociais, estas incluem a vergonha, ciúme, culpa e orgulho, e por fim, emoções de fundo, como o bem-estar, mal-estar, a calma e a tensão.
Damásio (1996) distingue as emoções em duas vertentes, as emoções iniciais que designa de emoções primárias, e as emoções adultas, são designadas como emoções secundárias. A emoção pode ser vista como a:
colecção de mudanças no estado do corpo que são induzidas numa infinidade de órgãos através das terminações das células nervosas sob o controlo de um sistema cerebral dedicado, o qual responde ao conteúdo dos pensamentos relativos a uma determinada entidade ou acontecimento" (Damásio, 1996:153).
As emoções expressam-se através do corpo, as respostas emocionais resultam em modificações profundas no corpo, estas modificações são visíveis e semelhantes nas mais diferentes culturas. De acordo com James (apud Ellsworth, 1994) a emoção é transmitida através do corpo, é visível. O corpo demonstra a emoção através da excitação, o corpo é parte integrante do processo de sentir uma emoção. James defende que a consciência do estímulo e da mudança física inicia o processo, sendo que a cognição desempenha um papel muito relevante neste sistema (Ellsworth, 1994).
Ekman (Ekman, 1999), contudo, discorda com esta visão mais redutora de James, defendendo que pode não existir necessariamente uma exteriorização da emoção, uma vez que possuímos a capacidade de disfarçar ou atenuar aquilo que estamos a sentir.
No que diz respeito à geração de emoção destaca-se o modelo OCC (Ortony, Clore e Collins) desenvolvido por Ortony, Clore e Collins em 1988 (Ortony, Clore, & Collins, 1990), tendo-se estabelecido como o modelo standard para a geração de emoção em agentes. Para que os agentes virtuais e robots consigam sentir e expressar emoção é necessário implementar um modelo de emoção que capacite os robots a sentir da mesma forma que o ser humano. O modelo deve avaliar todas as situações com que o robot se poderá deparar e devolver uma estrutura para as variáveis que determinam a intensidade da emoção (Figura 7) (Bartneck, 2002).
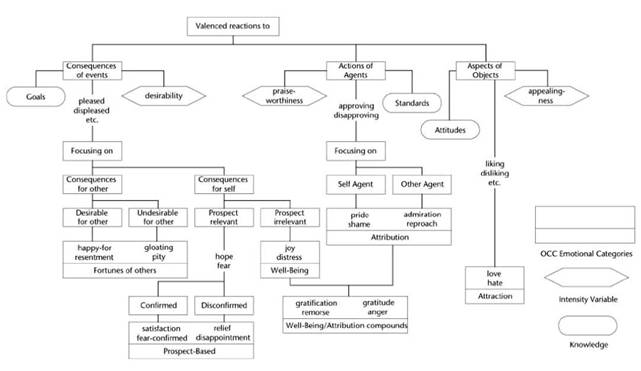
Figura 7: Modelo OCC. Fonte: (Bartneck, 2002: 1).
A integração do modelo OCC (Ortony, Clore e Collins) na concepção de um companheiro virtual é o primeiro passo, é o início de uma jornada que compreende a conceptualização de várias componentes, que quando finalizadas resultam num ser sociável, civilizado, capaz de interagir com o ser humano de forma natural, e até desenvolver uma relação a longo termo baseada numa troca sincera de sentimentos e experiências.
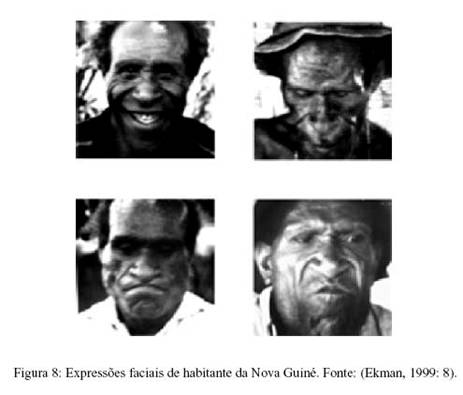
Em meados da década de 60 o estudo das expressões faciais era ainda incipiente e pouco explorado, à excepção dos estudos de Darwin (apud Ekman, 1999) que, na sua obra The Expression of the Emotions in Man and Animals, defendia o facto de as expressões de emoção serem iguais em todo o mundo.
Uma das poucas posições contrastantes foi tomada por Tomkins[5]e que inspirou Ekman a desenvolver vários estudos para confirmar a universalidade da expressão de emoções. A população da Nova Guiné foi escolhida como alvo de estudo da emoção e da sua expressão, uma vez que se tratava de uma cultura isolada e sem acesso aos media, sendo a escolha ideal para demonstrar que na generalidade todos respondemos da mesma forma a determinadas situações, como a morte de alguém querido, um reencontro ou um susto (Ekman, 1999) (Figura 8).
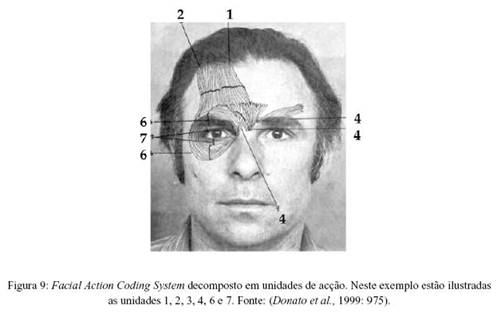
Este estudo culminou no desenvolvimento de um método para medir as expressões faciais, o Facial Action Coding System (FACS), uma referência para estudos relacionados com expressão de emoção, processos cognitivos e interacção social (Ekman, 1993, Kaiser & Wehrle, 2000; Saldien et al., 2008). Este é um método que oferece uma descrição objectiva e completa dos sinais faciais, nomeadamente componentes de movimento ou acções faciais e foi desenvolvido com o recurso a apalpação, conhecimentos de anatomia e registos de vídeo, que mostram a contracção dos músculos e as mudanças físicas na face (Donato et al., 1999). Foram definidas 66 unidades de acção ou Action Units (AU) que correspondem a cada movimento independente da face (Figura 9), ainda que a face humana seja capaz de produzir 250 000 expressões, apenas 100 conjuntos constituem símbolos distintos e distinguíveis (Donato et al., 1999; Lisetti & Schiano, 2000).
Contudo, a expressão de emoção não se restringe apenas aos movimentos dos músculos faciais, também a posição da cabeça, os movimentos das mãos, a postura corporal e a entoação da voz dão elevado contributo para a percepção do estado emocional de um indivíduo (Ekman, 1993).
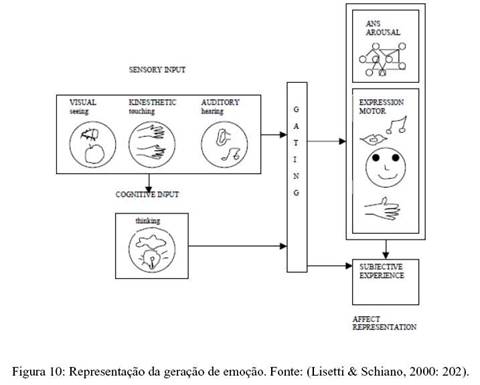
A expressão de emoção está intimamente ligada a três fenómenos: a excitação do sistema nervoso autónomo (ANS); a expressão e a experiência subjectiva, como é possível verificar na Figura 10. Estes fenómenos em conjunto demonstram que as emoções são despoletadas por uma conjunção de eventos, que culmina na sua expressão facial (Lisetti & Schiano, 2000).
A personalidade forma-se a partir da totalidade dos comportamentos, disposições, temperamentos e características emocionais de um indivíduo, que são verificadas com consistência num espaço de tempo de situações determinadas (André et al., 2000; Dryer, 1999).
Tal como a emoção, a personalidade é um factor humanizante, quando presente num robot ou companheiro virtual, dotando o agente com uma série de características que permitem o desenvolvimento de empatia com o utilizador e a criação de uma relação social mais natural.
A aplicação da personalidade a agentes virtuais seria possível através da utilização de frases directas e expressivas, voz alta e gesticulação expansiva, no caso de um agente extrovertido. A personalidade incorporada, em conjunto com a emoção, funciona como filtro para o processo de tomada de decisão e para a selecção do comportamento a adoptar pelo agente (André et al., 2000).
Memória É graças à memória que construímos as nossas experiências e só assim sabemos quem somos. O nosso presente é afectado pelas recordações que possuímos do passado:
sem memória, não haveria dantes mas apenas agora, não haveria a possibilidade de utilizar capacidades adquiridas nem a de recordar nomes ou de reconhecer rostos (Gleitman, 1993: 277).
Adquirir novas informações e conhecimento só é possível através da memória, isto é, a memória é a consequência de aprender algo com uma nova experiência (McGaugh, 2003).
A influência da emoção na cognição dá-se através da influência da emoção na memória. A memória tem um papel igualmente activo nas tarefas cognitivas em que a emoção intervém, como a aprendizagem, percepção, tomada de decisão e pensamento racional (Picard, 2000). Por conseguinte, a memória constitui mais um dos componentes essenciais ao desenvolvimento de um companheiro virtual, na medida em que é esta que lhe permite armazenar a informação transmitida pelo utilizador e manter um registo das experiências vividas e partilhadas.
Em função da aglutinação de todas as vertentes que foram tidas em consideração ao longo do presente enquadramento do estudo, torna-se possível almejar à criação de um companheiro virtual que reúna todos os requisitos necessários ao sucesso, na vertente da eficácia perante o utilizador. Na junção dos princípios que o design emocional preconiza, como a utilização de várias estratégias para envolver e captar a atenção do utilizador, como a presença de cores vivas e formas redondas e naturais, com a inclusão de emoção, e sua expressão no companheiro, reside a chave para a concepção de uma entidade consistente e que cumpra os objectivos propostos. A conjunção dos campos aportados demonstra-nos que é possível criar uma entidade com as capacidades necessárias ao desenvolvimento de inteligência emocional e social, possibilitando gerar empatia com o utilizador, e empreender uma interacção satisfatória para o aprendiz.
Considera-se que alguns dos princípios do design emocional se encontram já em prática na presente investigação, sendo que o companheiro apresenta formas físicas aproximadas das humanas tentado, assim, apelar às reacções mais instintivas de familiarização por parte do utilizador.
No presente momento a investigação em curso está direccionada para o relacionamento com o público-alvo do estudo (crianças dos 6 aos 7 anos), sendo que estes demonstram uma elevada ânsia em interagir com o companheiro e o percepcionam já como um amigo. Considera-se que os factores de sucesso deste companheiro virtual se prendem com o facto de este ter uma aparência antropomórfica, bem como o facto de o companheiro apresentar um modelo de comunicação multi-modal, em que este fala, gesticula e tem comportamentos distintos.
No entanto, no futuro pretende-se explorar ainda mais as potencialidades do design emocional, especialmente no que diz respeito à utilização de cores fortes e vivas, para melhor captar a atenção do utilizador, e verificar a reacção do público-alvo perante esses aspectos. Pretende-se, igualmente, continuar a estudar o impacto dos companheiros virtuais como auxílio e estratégia de aprendizagem, bem como a relevância que a expressão de emoção por parte do companheiro assume neste processo.
André, E., Klesen, M., Gebhard, P., Allen, S., & Rist, T. (2000). Exploiting Models of Personality and Emotions to Control the Behavior of Animated Interactive Agents. Alemanha.
Bartneck, C. (2002). Integrating the OCC Model of Emotions in Embodied Characters. Eindhoven: Eindhoven Universiy of Eindhoven.
Breazeal, C. (2003). "Emotion and sociable humanoid robots", in International Journal of Human-Computer Studies , Vol. 59, pp. 119-155.
Breazeal, C. (2003). "Function meets Style: Insights from Emotion Theory Applied to HRI", in IEEE Transactions on Man, Cybernetics and Systems , XX.
Breazeal, C. (2000). Sociable Machines: Expressive Social Exchange Between Humans and Robots. Massachusetts Institute of Technology.
Breazeal, C., & Brooks, R. (2003). Robot Emotion: A Functional Perspective. In Who Needs Emotions: The Brain Meets the Robot. MIT Press, pp. 271-310.
Cassel, J. (2001). "Embodied Conversational Agents: Representation and Intelligence in User Interface", in AI Magazine , disponível em:http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.27.9342&rep=rep1&type=pdf, acedido em 2009-03-10.
Damásio, A. (2003). Ao Encontro de Espinosa – As Emoções Sociais e a Neurologia do Sentir. Lisboa: Publicações: Europa-América.
Damásio, A. (1996). O erro de Descartes: emoção, razão e cérebro humano. Lisboa: Publicações: Europa-América.
Damásio, A. (2000). O Sentimento de Si: o corpo, a emoção e a neurobiologia da consciência. Lisboa: Publicações: Europa-América.
de Vos, E. (2002). Look at that Doggy in Windows, on effects of anthropomorphism in human-agent interaction. Utrecht University.
Donato, G., Bartlett, M. S., Hager, J. C., Ekman, P., & Sejnowski, T. J. (1999). "Classifying Facial Actions", in IEEE Transactions on Pattern Analisys and Machine Intelligence, Vol. 21, pp. 974-989.
Dryer, D. C. (1999). "Getting Personal with Computers: How to Design Personalities for Agents", in Applied Artificial Intelligence. Califórnia: Taylor & Francis, Vol. 13, pp. 273-295.
Ekman, P. (1999). "Basic Emotions", in Handbook of Cognition and Emotion. Sussex: John Wiley & Sons, Ltd.
Ekman, P. (1993). Facial Expression and Emotion, in American Psychologist , Vol. 48, pp. 384-392.
Ellsworth, P. C. (1994). "William James and Emotion: Is a Century of Fame Worth a Century of Misunderstanding?", in Psychological Review , Vol. 101, pp. 222-229.
Gleitman, H. (1993). Psicologia. Lisboa: Fundação Calouste Gulbenkian.
Gross, J. J. (1999). "Emotion and Emotion Regulation", in Handbook of Personality: Theory and Research. New York: Guildford Press, pp. 525-552.
Herbon, A., Peter, C., Markert, L., van der Meer, E., & Voskamp, J. (2005). Emotion Studies in HCI- a New Approach. Berlim.
Johnson, W. L., Rickel, J. W., & Lester, J. C. (2000). "Animated Pedagogical Agents: Face-to-Face Interaction in Interactive Learning Environments", in International Journal of Artificial Intelligence in Education .
Kaiser, S., & Wehrle, T. (2000). Emotion research and AI: Some theoretical and technical issues. Genébra.
Lester, J. C., & Stone, B. A. (1997). Increasing Believability in Animated Pedagogical Agents. Raleigh.
Lisetti, C. L., & Schiano, D. J. (2000). "Automatic Facial Expression Interpretation: Where Human-Computer Interaction, Artificial Intelligence and Cognitive Science Intersect", in Pragmatics and Cognition: Special Issue on Facial Information Processing: A Multidisciplinary Perspective, Vol. 8, pp. 185-235.
Malfaz, M., & Salichs, M. A. (2004). A new architecture for autonomous robots based on emotions. Madrid: Carlos III University of Madrid.
McGaugh, J. L. (2003). Memory and Emotion: The Making of Lasting Memories. Londres: Weidenfeld & Nicolson.
Norman, D. A. (2004). Emotional design: why we love (or hate) everyday things. Nova Iorque: Basic Books.
Ortony, A., Clore, G. L., & Collins, A. (1990). The Cognitive Structure of Emotions. Cambridge: Cambridge University Press.
Paiva, A., Machado, I., & Martinho, C. (1999). "Enriching Pedagogical Agents with Emotional Behavior: The Case of Vincent", in Workshop on Animated and Personified Pedagogical Agents, Vol. VIII, pp. 47-55.
Picard, R. W. (2000). Affective Computing. Cambridge: MIT Press.
Picard, R. W. (1999). Affective Computing for HCI. Proceedings HCI. Germany, pp. 242-247.
Saldien, J., Goris, K., Vanderborght, B., & Lefeber, D. (2008). On the design of an emotional interface for the huggable robot Probo, disponível em: http://www.aisb.org.uk/convention/aisb08/proc/proceedings/01%20Reign%20of%20Catz %20Dogz/01.pdf, acedido em 2009-03-10.
TechTalk. (2008). "Meet Nexi: the Media Lab's latest robot star", in TechTalk: Serving he MIT Community , Vol. 52, pp. 3.
Autores:
Juliana Costa
Maria João Antunes
Lídia Oliveira Silva
Universidade de Aveiro
[1] www.lirec.eu (em: 10-03-2009).
[2] Justine Cassel é a directora actual do Center for Technology & Social Behavior e docente na Northwestern University.
[3] Cynhia Breazeal é Professora Assistente no MIT Media Lab.
[4] Ana Paiva é docente no Instituto Superior Técnico.
[5] Investigador na área da personalidade.
| Página anterior | Voltar ao início do trabalho | Página seguinte |
|
|
|




